On going projects
ERI: Exploration of the Design, Dynamics and Control of self-Decoupled, Cable-Driven Serial Robots
(Funded by NSF )
A serial robot is like a human arm; it consists of a series of rigid rod-like objects (e.g. upper arm and forearm), consecutively interconnected through joints (e.g. elbow). Serial robots have a relatively compact size and are easy for operation. Thus, serial robots are widely used in industrial automation, space exploration, medical services, etc. However, the application of serial robots can be severely constrained by space limitations and environmental hazards. Space limitation requires robotic structures to be small and compact, yet strong which is difficult with motors at joints. Hazardous environments, such as heat or chemicals, can damage the electronic components and actuators if directly installed on the robotic joints. A fully cable-driven robot would situate electronic components and motors/actuators far away from the hazardous environment, and utilize cables/wires to transmit the power, thereby providing a potential solution to these two challenges. However, the joints of a cable-driven serial robot are coupled by the cable transmission, and as such, the rotation of one robotic joint affects the motion of the other joints, making precise position control extremely challenging. This award will support fundamental research that will identify solutions for overcoming motion coupling issues in cable-driven serial robots, modeling the unique dynamics, and building a controller suitable for enabling this dynamic modeling.
(Funded by NSF )
A serial robot is like a human arm; it consists of a series of rigid rod-like objects (e.g. upper arm and forearm), consecutively interconnected through joints (e.g. elbow). Serial robots have a relatively compact size and are easy for operation. Thus, serial robots are widely used in industrial automation, space exploration, medical services, etc. However, the application of serial robots can be severely constrained by space limitations and environmental hazards. Space limitation requires robotic structures to be small and compact, yet strong which is difficult with motors at joints. Hazardous environments, such as heat or chemicals, can damage the electronic components and actuators if directly installed on the robotic joints. A fully cable-driven robot would situate electronic components and motors/actuators far away from the hazardous environment, and utilize cables/wires to transmit the power, thereby providing a potential solution to these two challenges. However, the joints of a cable-driven serial robot are coupled by the cable transmission, and as such, the rotation of one robotic joint affects the motion of the other joints, making precise position control extremely challenging. This award will support fundamental research that will identify solutions for overcoming motion coupling issues in cable-driven serial robots, modeling the unique dynamics, and building a controller suitable for enabling this dynamic modeling.
Developing a clinical diagnostic tool for age-related cochlear synaptopathy (Funded by NIH/Gateway Biotechnology, Inc.)
This project is to develop a new electrical device able to generate a calibration pulse to reduce high variability in auditory brainstem response (ABR)/electrocochleography (ECochG) wave metrics. The validation issue will be addressed by applying machine learning to identify multiple ABR/ECochG markers associated with cochlear synaptopathy first in animal models, in which cochlear synaptopathy can be directly validated by histologic synaptic counting, and then apply these identified features for human diagnosis.
This project is to develop a new electrical device able to generate a calibration pulse to reduce high variability in auditory brainstem response (ABR)/electrocochleography (ECochG) wave metrics. The validation issue will be addressed by applying machine learning to identify multiple ABR/ECochG markers associated with cochlear synaptopathy first in animal models, in which cochlear synaptopathy can be directly validated by histologic synaptic counting, and then apply these identified features for human diagnosis.
Robot for single incision laparoscopic colorectal surgeryWill be updated
|
UAV in medical applicationWill be updated
|
Human and robot interaction based on robotic walkerWill be updated.
|
An automated transcutaneous electrical acustimulation device for treating digestive diseases
Will be updated
Will be updated
Previous projects
An automated Shuttlebox Multi-system for Sound-based Avoidance Behavior
(Funded by Gateway Biotechnology Inc. )
The project is to develop an automated shuttle box multi-system which will be used for animal behavior testing under a drug and gene hearing therapy.
(Funded by Gateway Biotechnology Inc. )
The project is to develop an automated shuttle box multi-system which will be used for animal behavior testing under a drug and gene hearing therapy.
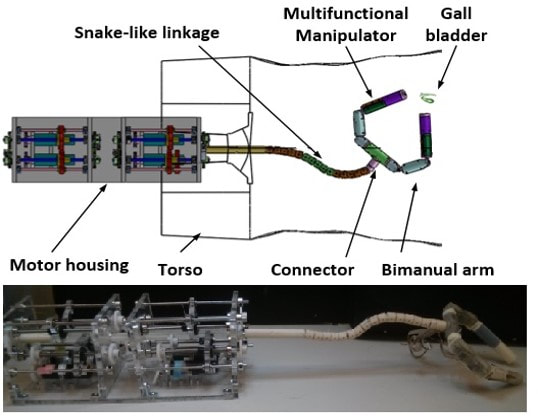
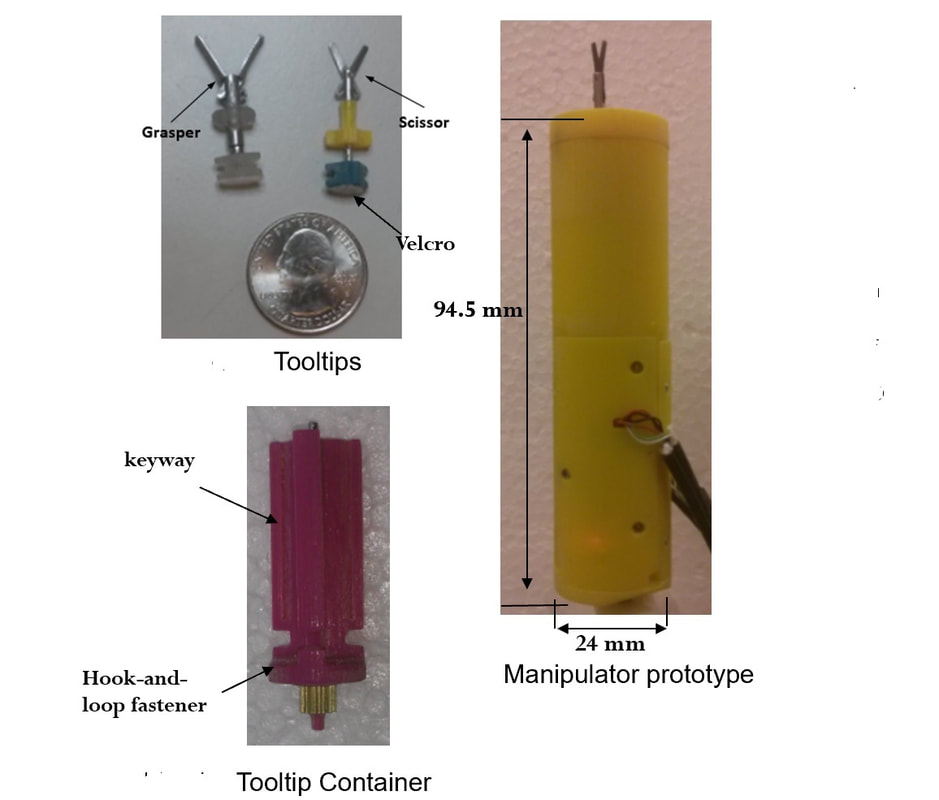
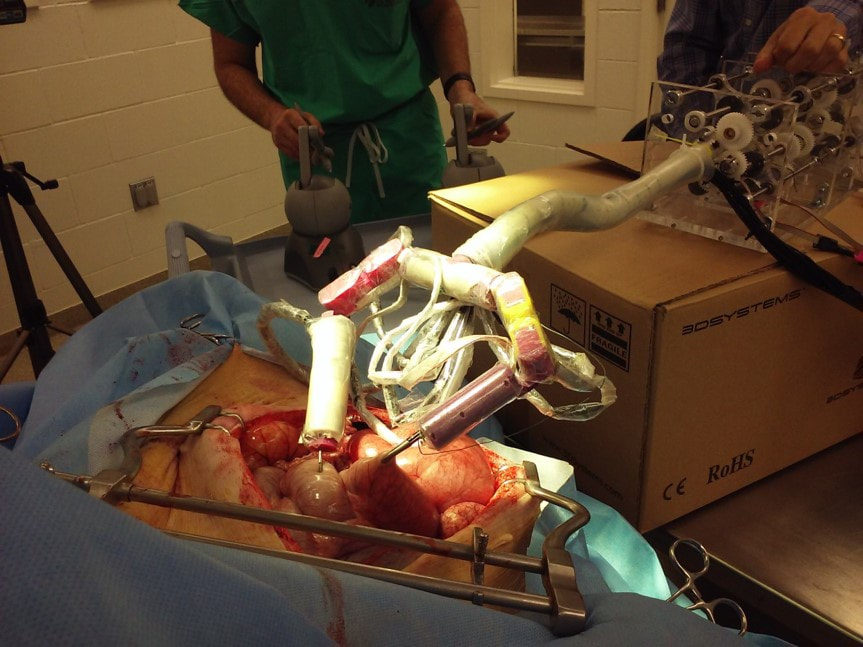
Multifunctional robot for Natural Orifice Transluminal Endoscopic Surgery (NOTES)
NOTES, an emerging technique, passes the instrument through a natural orifice, such as the vagina, anus or esophagus, and gains access to the peritoneal cavity through internal tissue incision for surgery. Compared with open surgery and traditional minimal invasive surgery, it can provide patients with more potential advantages such as no visible scarring, less post-operative pain and a lower anesthesia requirement. However, its prevalence in practical clinical human surgeries is challenged by many constraints, including constraints fundamental to the NOTES approach, such as limited space, as well as constraints related to the surgical tools, such as unstable actuation devices, weak tool tips, lack of visual/tool triangulation, and lack of dexterous multitasking tools. To overcome the constraints, this project designed a multifunctional bimanual NOTES robot with tool-changing function for surgery, and a snake-like drive mechanism to assist the robot to pass a natural orifice.
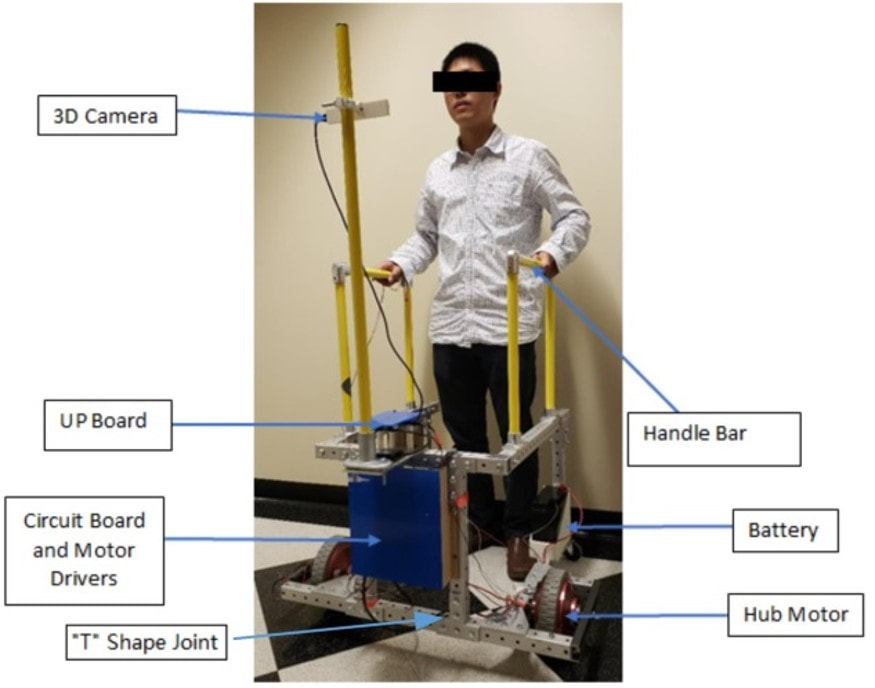
Motorized robotic walker for human walking asisstance
Impaired mobility has huge negative impacts on the senior populations’ physical and mental health. Existing assistive tools, such as canes and walker/rollators, are helpful for such mobility-challenged individuals, while such tools also disrupt the users’ walking rhythm and increase their metabolic energy consumption. A motorized robotic walker provides senior people with automatic assistance can solve the issue. The wheeled robotic walker is guided by an image processing system which can automatically accompany the user to provided the walking assistance if needed.

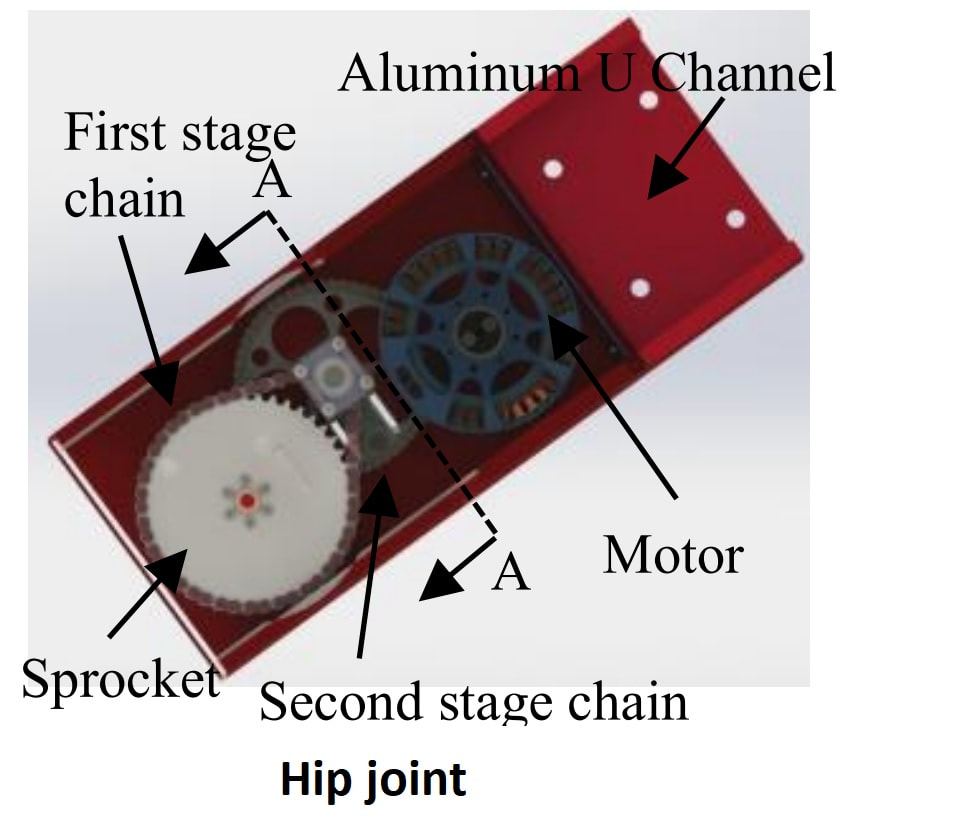
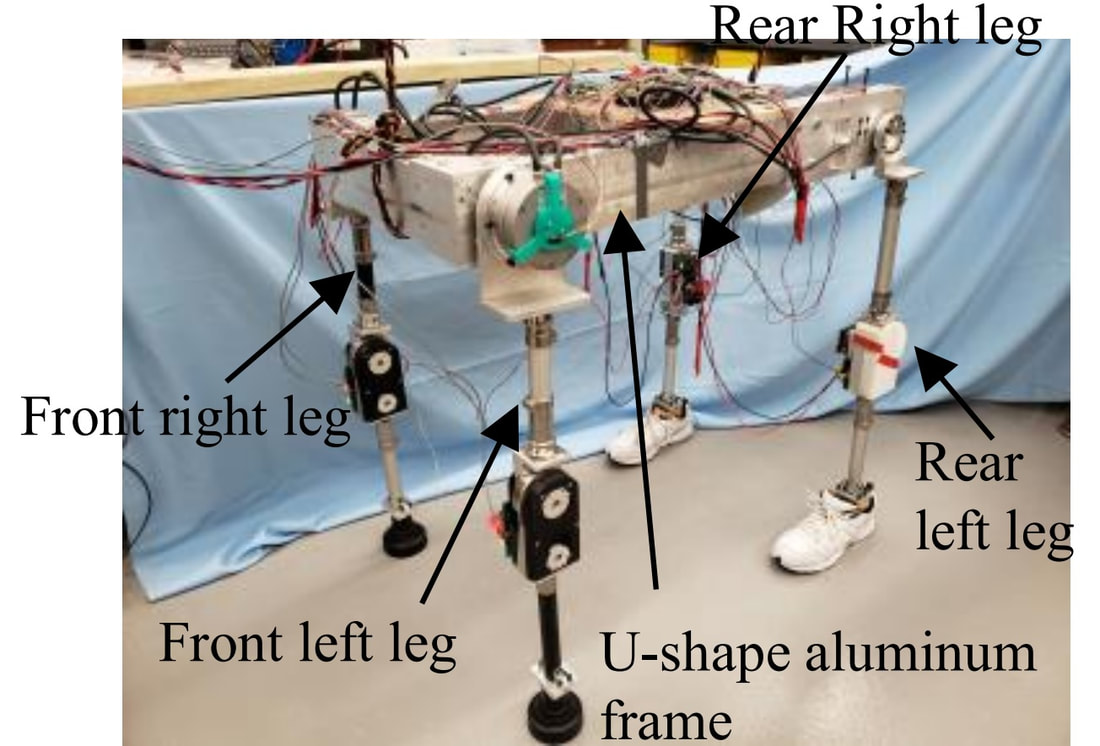
Quadrupedal Human-Assistive Robotic Platform (Q-HARP)
Instead of using the ubiquitous wheeled locomotion, this assistive robot utilizes legged locomotion, leveraging its superior capability in overcoming challenging terrains.